
择要本文援用地点:本论文是在高等驾驶员帮助体系,特殊是主动驾驶车辆的配景下停止的。其目标是提出一种加强途径车辆定位的方式。提出的方式是应用摄像头检测车道线,并将其与舆图婚配,以定位车辆的准确地位。本文分为三个局部:舆图、直线检测器跟定位,该舆图基于OpenStreetMap数据,线检测器是基于边沿检测的,将成果与迭代近来点算法停止了比拟,应用了诸如ROS(用于数据同步)跟CUDA(用于并行化)等技巧。先容本文的目标是实现一种应用视觉信息跟舆图来改良车辆定位的方式。咱们还盼望验证以上限制:•及时处置•合适车辆应用的便宜装备•嵌入在车辆上。方式如图1.1所示。它分为三个局部:•OpenStreetMap舆图的处置•车道线检测•定位,包含与ICP算法的比拟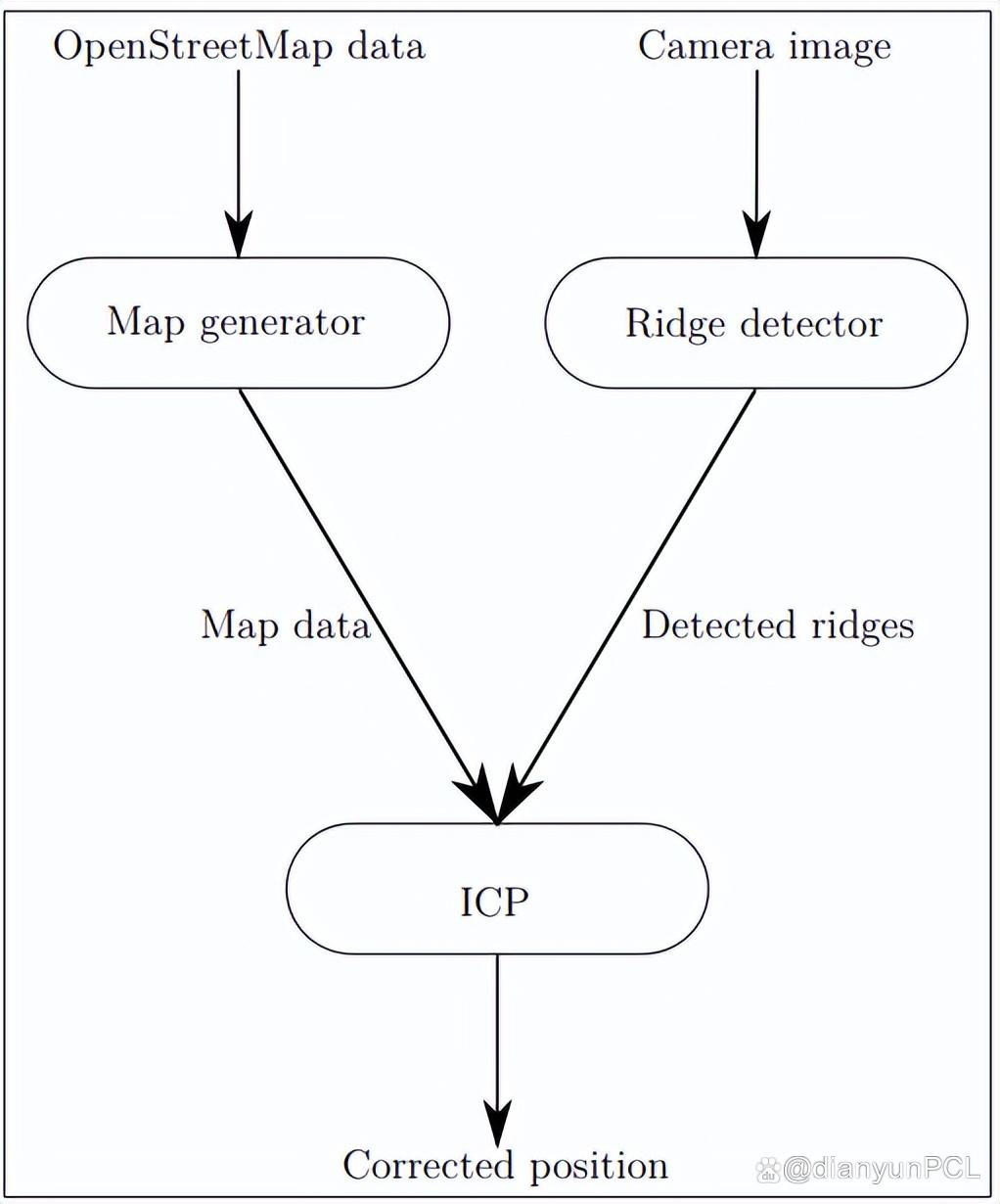 图1.1:该方式的三个局部:舆图天生、边沿检测跟与ICP算法配准OpenStreetMap数据为了改良定位方式,咱们须要准确的舆图,别的,因为咱们的本钱限度,咱们盼望它是收费跟开源的。因而,OpenStreetMap看起来是一个很好的处理计划,由于它是收费的、开源的跟用户克己的,这象征着它易于应用并顺应咱们的需要。OpenStreetMap数据由三个基础原语构成:•节点•道路•关联节点用其纬度跟经度界说地舆点,这能够是实在的物理工具,比方大众汽车站,也能够是界说途径外形的设想点。道路界说更庞杂的特点,如途径跟界限,它们包括在节点的有序列表中,节点列表界说特点的外形。假如途径的第一个节点跟最后一个节点雷同,则这是一条能够界说地区的关闭途径,关联描写节点、道路跟/或道路关联之间的其余束缚。如图3.1所示
图1.1:该方式的三个局部:舆图天生、边沿检测跟与ICP算法配准OpenStreetMap数据为了改良定位方式,咱们须要准确的舆图,别的,因为咱们的本钱限度,咱们盼望它是收费跟开源的。因而,OpenStreetMap看起来是一个很好的处理计划,由于它是收费的、开源的跟用户克己的,这象征着它易于应用并顺应咱们的需要。OpenStreetMap数据由三个基础原语构成:•节点•道路•关联节点用其纬度跟经度界说地舆点,这能够是实在的物理工具,比方大众汽车站,也能够是界说途径外形的设想点。道路界说更庞杂的特点,如途径跟界限,它们包括在节点的有序列表中,节点列表界说特点的外形。假如途径的第一个节点跟最后一个节点雷同,则这是一条能够界说地区的关闭途径,关联描写节点、道路跟/或道路关联之间的其余束缚。如图3.1所示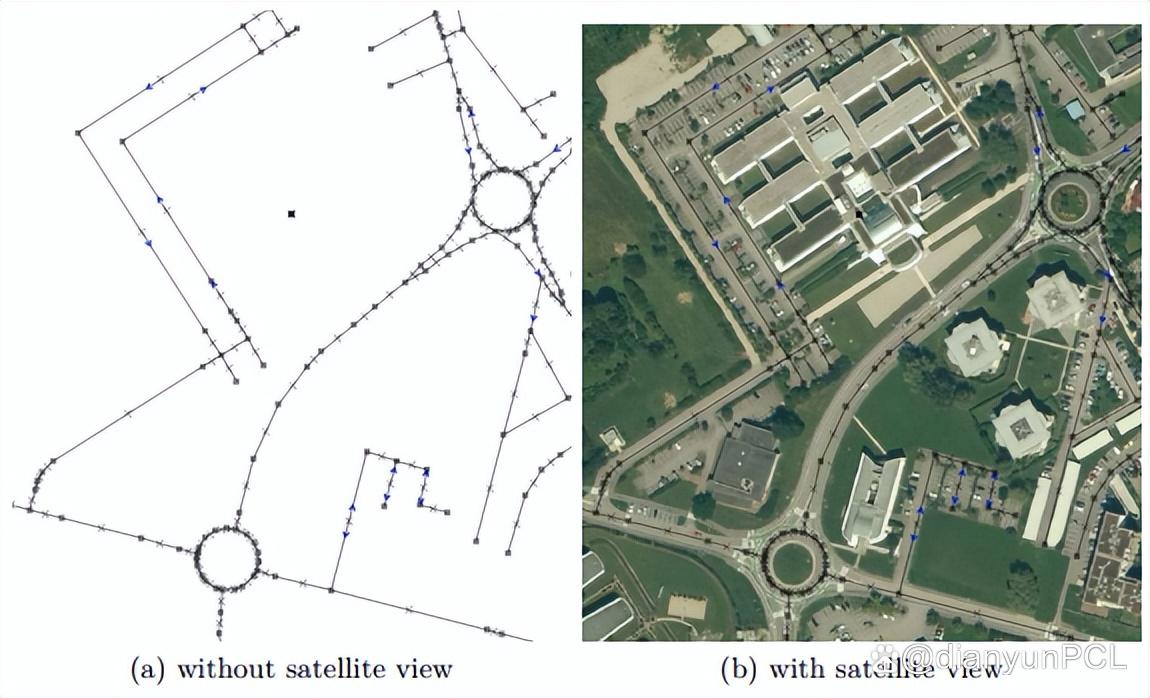 图3.1:在自顶向下视图上表现OpenStreetMap数据车道线天生OpenStreetMap的一个成绩是它缺乏车道线数据,因而,必需在舆图上增加车道标志,这是应用途径跟车道数据半主动实现的,咱们创立了一个新的OpenStreetMap舆图标签来辨认车道标志,标志的键是“标志”,其值是“旁边”或“边框”,详细取决于线的地位。而后,对每条途径,咱们创立了途径上车道数加上一条的线,界限线的“标志”标志值为“border”,其余线的值为“middle”。如图3.2所示,这一局部由咱们所称的线天生器主动实现。线天生器对每条途径停止迭代,而后对途径的每个节点停止迭代,以将节点复制所需的次数,从而创立表现车道标志的新途径。因为车道绝对于节点坐标的地位不商定,咱们决议将坐标设置为途径的核心,并在途径两侧宰割车道。
图3.1:在自顶向下视图上表现OpenStreetMap数据车道线天生OpenStreetMap的一个成绩是它缺乏车道线数据,因而,必需在舆图上增加车道标志,这是应用途径跟车道数据半主动实现的,咱们创立了一个新的OpenStreetMap舆图标签来辨认车道标志,标志的键是“标志”,其值是“旁边”或“边框”,详细取决于线的地位。而后,对每条途径,咱们创立了途径上车道数加上一条的线,界限线的“标志”标志值为“border”,其余线的值为“middle”。如图3.2所示,这一局部由咱们所称的线天生器主动实现。线天生器对每条途径停止迭代,而后对途径的每个节点停止迭代,以将节点复制所需的次数,从而创立表现车道标志的新途径。因为车道绝对于节点坐标的地位不商定,咱们决议将坐标设置为途径的核心,并在途径两侧宰割车道。

娱乐棋牌排行榜前十名推荐_十大正规娱乐棋牌
客服热线:400-123-4567
邮箱:admin@baidu.com
地址:广东省广州市天河区88号